1. Įrenkite pelėje elektros grandinę
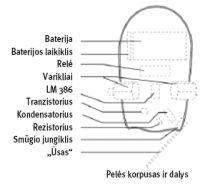 Sulituosime dalis be papildomo pagrindo – tam puikiausiai tiks pelės korpusas. Jame įtaisysime variklius, o schemą parengsime atskirai, kad galėtume patikrinti, ar ji gerai veikia.
Sulituosime dalis be papildomo pagrindo – tam puikiausiai tiks pelės korpusas. Jame įtaisysime variklius, o schemą parengsime atskirai, kad galėtume patikrinti, ar ji gerai veikia.
Prieš imdamiesi lituoklio patikrinkite, ar jūsų pelėje pakanka vietos. Atsukite pelės korpuso varžtus ir pažiūrėkite, ar jame tilps du nuolatinės srovės varikliai ir 9 voltų baterija. Varžtus galite paslėpti po nailoninėmis juostelėmis pelės apačioje. Nepameskite jų – tai padės sumažinti trintį.
2. Atlikite autopsiją
 Analoginė (ne optinė!) pelė rutuliuko judėjimą fiksuoja dviem ašimis, sukančiomis į krumpliaračius panašius ratukus. Krumpliaračių dantukai sukasi tarp infraraudonųjų spinduolių ir imtuvų, fiksuojančių mirgančius šešėlius ir pagal juos nustatančių pelės judėjimo kryptį bei spartą. Infraraudonieji spinduoliai veikia kaip roboto akys. Pelės buferis pakeičia variklių sukimosi kryptį tokiam laikotarpiui, per kurį išsikrauna kondensatorius. Tuo metu pelė juda atbula. Akių fiksuojamo apšviestumo skirtumas sustiprinamas ir perduodamas elektros grandinei, valdančiai du variklius. Vienam varikliui tiekiant mažiau galios, kitas jos gauna daugiau – taip pelytė vairuojama. |
|---|
Radę tinkamą pelę, pašalinkite visus mechaninius ir elektroninius komponentus. Atjunkite kabelį, išimkite ratuką ir iškrapštykite spausdintinę plokštę. Padėkite šias dalis į šalį. Išpjaukite ratuką, visas plastikines montavimo dalis, išskyrus rezistorių laikiklius. Tą patį padarykite su viršutine dalimi, tačiau nepašalinkite detalių, laikančių pelės klavišus.
Pastaba: plastiko dulkės labai kenksmingos, tad užsidėkite akinius ir kaukę.
3. Įrenkite jungiklį
Paskutinis parengiamųjų darbų etapas – jungiklio įrengimas. Įtvirtinkite jį taip, kad atrodytų kaip uodega. Raskite pelės uodegai tinkamą vietą, išgręžkite kiaurymę jungikliui prakišti. Jei jungiklis tvirtinamas dviem veržlėmis, vieną nuimkite, prakiškite jungiklį pro skylę ir užveržkite veržlę pelės korpuso išorėje. Kartais abi pelės puses laikantis varžtas įsukamas ten, kur turėtų būti pelės uodega. Jeigu taip iš tiesų yra, išimkite varžtą, o pelę sutvirtinkite klijais arba lipniąja juosta.
4. Sumontuokite variklį ir bateriją
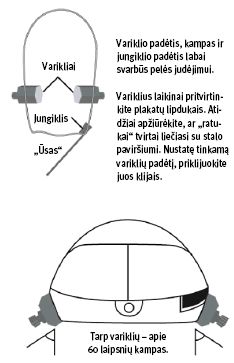 Apsispręskite, kur bus išdėstyti didesni komponentai ir kaip darysite variklių išpjovas. Pelių dizainas skiriasi, tačiau svarbu, kad varikliai būtų įrengti statmenai pagrindinei korpuso linijai. Tokiu atveju robotas galės judėti tiesia linija. Už variklių palikite pakankamai vietos baterijai.
Apsispręskite, kur bus išdėstyti didesni komponentai ir kaip darysite variklių išpjovas. Pelių dizainas skiriasi, tačiau svarbu, kad varikliai būtų įrengti statmenai pagrindinei korpuso linijai. Tokiu atveju robotas galės judėti tiesia linija. Už variklių palikite pakankamai vietos baterijai.
Tolesnis žingsnis -- išpjauti ašių ir ratukų angas.
Iš korpuso išlendančias ašis pakreipkite taip, kad robotas ant jų galėtų laikytis. Jos lems ir judėjimo spartą. Kuo statesnis kampas, tuo mažiau ratukai liesis su paviršiumi ir tuo lėčiau važiuos robotas. Tačiau tai nėra blogai. Daugelis konstruktorių skundėsi, kad robotas-pelė juda per sparčiai. Jeigu pasirinkote variklius, analogiškus „Solarbotics RM1“, rekomenduojame montuoti 60 laipsnių kampu.
5. Įrenkite smūgio fiksatorių ir padangas
Jūsų robotas turės ilgą „ūsą“ – smūgio fiksatorių, skatinsiantį pelę pabėgti. Raskite spausdintinę plokštelę, kurią išėmėte iš pelės. Pamatysite mažą plastiko dėžutę, kuri paspaudus pradeda spragsėti. Išlituokite dėžutę iš spausdintinės plokštės, glaistu pritvirtinkite ją pelės priekinėje dalyje. Tai bus jungiklis. Lipniąja juosta prilipdykite kieto plastiko gabalėlį, kad jis uždengtų jungiklį ir tarnautų lyg platus buferis.
 Jūsų tikslas – suformuoti jungiklį, sužadinamą smūgiu bet kurioje „ūso“ vietoje. Taigi paspaudę plastiko juostelę turėtumėte išgirsti spragtelėjimą. Jei reikia, pakoreguokite plastikinės juostelės vietą, kad pelė atrodytų gražiai. Kai būsite patenkinti rezultatu, pelės apačioje išpjaukite kiaurymę, per kurią galėtumėte iškišti jungiklį. Plastikinę juostelę sumažinkite maždaug iki 0,6 x 6 cm dydžio.
Jūsų tikslas – suformuoti jungiklį, sužadinamą smūgiu bet kurioje „ūso“ vietoje. Taigi paspaudę plastiko juostelę turėtumėte išgirsti spragtelėjimą. Jei reikia, pakoreguokite plastikinės juostelės vietą, kad pelė atrodytų gražiai. Kai būsite patenkinti rezultatu, pelės apačioje išpjaukite kiaurymę, per kurią galėtumėte iškišti jungiklį. Plastikinę juostelę sumažinkite maždaug iki 0,6 x 6 cm dydžio.
Raskite guminę juostelę, kurios plotis būtų kaip iš variklio išsikišusių ašių. Atkirpkite reikalingo ilgio juostelę, apvyniokite ją ant ašių, sutvirtinkite klijais. Vietoj padangų tiks plastiko ir gumos vamzdeliai, kuriuos galbūt rasite savo „Lego“ konstruktoriuje.
6. Pelės smegenys
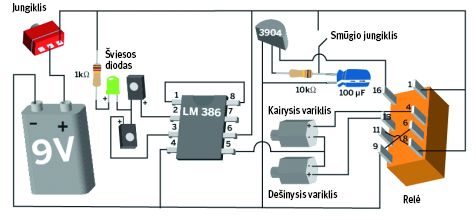
Pagrindinis pelės elektros grandinės komponentas – LM386 lustas – laukia dviejų įvesties signalų. Jei vienas signalas silpnesnis už kitą, silpnesnį lustas sustiprina tiek, kad jis prilygtų stipresniam. Signalams pasitelksime šviesą. Prijungę lusto išvestį prie variklių, gausite nedideles smegenis, skaitančias dviejų šviesos jutiklių signalus, sulyginančias juos ir didinančias blankesnės pusės galią. Taip sukursite robotą, judantį šviesos šaltinio link ir nuolat koreguojantį savo trajektoriją.
Smūgio fiksatorius įjungia relę, kuri sukeičia variklių įvestis keletui sekundžių. Robotukas bėga nuo šviesos šaltinio po kiekvieno susidūrimo su kitais daiktas – taip suteikiama pelei tikroviškumo. Viršuje pateiktoje diagramoje pavaizduota pelės smegenų schema.
7. Pelės akys
 Roboto akims galima pritaikyti pelėje buvusius infraraudonųjų spindulių spinduolius (fototranzistorius). Įprastoje pelėje per perforuotą koduojamą ratuką jie siunčia IR signalus, kuriuos priima fotodetektoriai.
Roboto akims galima pritaikyti pelėje buvusius infraraudonųjų spindulių spinduolius (fototranzistorius). Įprastoje pelėje per perforuotą koduojamą ratuką jie siunčia IR signalus, kuriuos priima fotodetektoriai.
Šie spinduoliai gali veikti ir kaip imtuvai, ir kaip siųstuvai. Pirmuoju atveju jie puikiai tiks akims. Dažniausiai spinduoliai atrodo lyg permatomos plastikinės dėžutės su nedideliais kupolais, o jutikliai yra juodos spalvos.
Raskite permatomus spinduolius. Nuimkite juos nuo plokštės. Savo rankose jūs laikote roboto akių porą.
8. Prie akių privirtinkite stiebelius
Infraraudonieji spinduoliai turi dvi trumpas kojeles. Robotui reikalingi optiniai nervai – stiebeliai, išnyrantys virš korpuso. Jie ne tik šauniai atrodo, bet ir lankstant juos kinta prietaiso jautrumas šviesai.
 Matuokliu nustatykite spinduolio anodą ir katodą.
Matuokliu nustatykite spinduolio anodą ir katodą.
Stiebeliams atpjaukite keturis 15 cm ilgio viengyslio laido gabaliukus. Jei turite raudonų ir juodų laidų, atpjaukite po du gabaliukus kiekvieno.
Prilituokite raudoną laidą prie katodinės (-) kojelės, o juodą – prie anodinės (+). Spalvas sukeitėme dėl to, kad spinduolius jungiame atvirkščiai. Jei srovė tekėtų įprasta kryptimi, šviesos sužadinti papildomi elektronai pasiklystų elektros srovėje. Tačiau pakeitus srovės kryptį šie elektronai labiau pastebimi, tad grandinė bus jautresnė. Prilitavę laidus susukite juos poromis, o nuo galų pašalinkite dalį izoliacijos.
Kurdami robotuką, naudokitės šia schema
9. Prijunkite lustą
Štai kaip įrengti lustą ir pagrindinę valdymo grandinę:
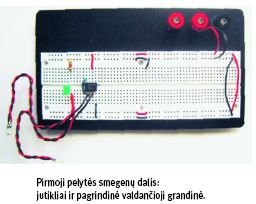 9a. Įtaisykite lustą elektroninės schemos maketo vagelėje. Visų lustų kojelės numeruojamos prieš laikrodžio rodyklę, pradedant nedidele duobute.
9a. Įtaisykite lustą elektroninės schemos maketo vagelėje. Visų lustų kojelės numeruojamos prieš laikrodžio rodyklę, pradedant nedidele duobute.
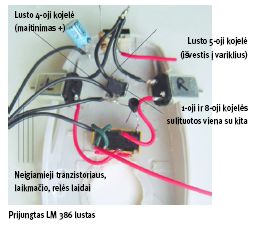
9b. Sujunkite 1-ąją ir 8-ąją kojeles laido gabaliuku. Šios kojelės yra atsakingos už stiprinimą, todėl sujungus jas trumpikliu padidėja schemos įvesties jautrumas.
9c. Prijunkite akių stiebelius, kiekvieną juodą laidą prijungdami prie 2-osios ir 3-iosios kojelių. Raudonus laidus sujunkite vieną su kitu ir pritvirtinkite prie kiaurymės maždaug 5–6 eilėmis kairiau nuo lusto. Mūsų horizontalios orientacijos plokštėje +/- elektros energijos šaltiniai įrengti apačioje ir viršuje, o visi lustai orientuoti į kairę pusę. Jeigu jūsų plokštė orientuota kitaip, komponentus atitinkamai pasukite.
9d. Atveskite neigiamąjį LED laidą (trumpesnį galą) iki kiaurymės, kurioje privirtinote raudonus akių stiebelių laidus, o teigiamąjį laidą – iki naujos kiaurymės, esančios kitoje plokštės vagelės pusėje. Prijunkite 1 kiloomo rezistoriaus vieną galą prie LED anodo, o kitą – prie maitinimo magistralės pliuso.
9e. Prijunkite lusto LM386 maitinimą (6-oji kojelė – prie maitinimo magistralės pliuso, o įžeminimo (4) kojelė – prie magistralės minuso).
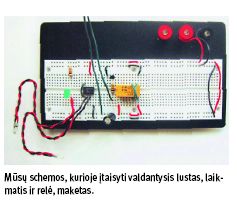
10. Sudarykite „pabėgimo“ grandinę
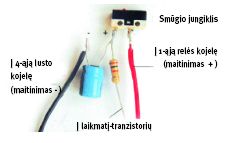
Jeigu dabar robotuko variklius prijungtume prie baterijos, jis tiesiog vaikytųsi šviesos šaltinį. Paįvairinsime jo elgesį, papildydami jį ūso sužadinamu „baimės“ refleksu. Tokiai grandinei sukurti prireiks smūgių fiksatoriaus, kurį jau įrengėte, 5 V DPDT relės, tranzistoriaus ir paprasto laikmačio, sudaryto iš kondensatoriaus ir rezistoriaus. Fiksatoriui užfiksavus smūgį, tranzistorius įjungia „pabėgimo“ grandinę, kurios kondensatorius priverčia roboto variklius suktis priešinga kryptimi. Po kelių sekundžių išsikrovus kondensatoriui, tranzistorius grąžina variklių valdymą įprastai grandinei.
Nuo rezistoriaus ir kondensatoriaus priklauso, kiek jūsų pelė bėgs „išsigandusi“. Galite eksperimentuoti su įvairiais elementais, kol suteiksite pelei pageidaujamus parametrus. Pamėginkite rezistorius nuo vieno iki 20 kiloomų, kondensatorius rinkitės 10–100 mikrofaradų eilės. Su tokiais elementais pelė „spruks“ apie aštuonias sekundes. Štai kaip prie plokštės pritvirtinti „pabėgimo“ grandinę:
10a. Relės kojeles numeruosime pagal jų padėtį ant elektroschemos maketo. Prijunkite relę maždaug per šešias eiles į dešinę nuo LM386 lusto. Relė užims 1–16 kiaurymes, nors turi tik aštuonias kojeles.
10b. Laidu sujunkite 8-ąją ir 11-ąją relės kojeles. Kitu laidu sujunkite 6-ąją ir 9-ąją kojeles. Įsijungus relei, šios jungtys pakeis variklio kryptį.
10c. Kondensatoriaus teigiamąjį laidą prijunkite prie nenaudojamos eilės plokštėje, truputį kairiau nuo relės, o katodą prijunkite prie neigiamosios maitinimo magistralės.
10d. Vieną rezistoriaus galą prijunkite prie kondensatoriaus, o kitą pritvirtinkite prie laisvos kiaurymės kitoje elektroschemos plokštės pusėje.
10e. Išplėskite tranzistoriaus kojeles ir jį prijunkite plokščiąja puse, nukreipta į vagelę plokštėje taip, kad jis būtų virš relės, o centrinę kojelę (bazę) būtų galima prijungti prie rezistoriaus laido, kairiąją kojelę (emiterį) – prie laisvo kontakto, dešiniąją (kolektorių) – prie 16-osios relės kojelės.
 10f. Prijunkite laidą prie kontakto, sujungto su rezistoriumi ir kondensatoriumi. Kitą laidą prijunkite prie teigiamojo maitinimo poliaus. Palenkite laidų galus taip, kad jie galėtų liestis, tačiau jų nesujunkite. Sujungti laidai veiks kaip smūgio fiksatoriaus jungiklis. Mes esame tingūs, tad darome prielaidą, jog jungiklis veikia, tačiau jūs galite sujungti kabelius ir patikrinti, ar taip yra iš tiesų.
10f. Prijunkite laidą prie kontakto, sujungto su rezistoriumi ir kondensatoriumi. Kitą laidą prijunkite prie teigiamojo maitinimo poliaus. Palenkite laidų galus taip, kad jie galėtų liestis, tačiau jų nesujunkite. Sujungti laidai veiks kaip smūgio fiksatoriaus jungiklis. Mes esame tingūs, tad darome prielaidą, jog jungiklis veikia, tačiau jūs galite sujungti kabelius ir patikrinti, ar taip yra iš tiesų.
10g. Relės 1-ąją ir 8-ąją kojeles prijunkite prie teigiamojo maitinimo poliaus. 9-ąją kojelę prijunkite prie neigiamosios magistralės. Galiausiai prijunkite tranzistoriaus kairiąją kojelę (emiterį) prie apatinės (neigiamosios) magistralės. Viskas, roboto smegenys paruoštos!
11. Prijunkite variklius ir elektrą
Dešiniojo variklio neigiamąjį gnybtą prijunkite prie LM386 lusto 5-osios kojelės, o teigiamąjį – prie 13-osios relės kojelės. Kairiojo variklio neigiamąjį gnybtą prijunkite prie LM386 5-osios kojelės, o teigiamąjį – prie relės 4-osios kojelės. Daugumos variklių teigiamasis gnybtas žymimas duobute arba (+) signalu.
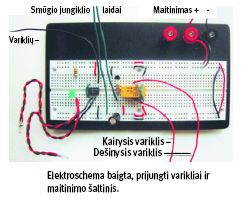 Prie schemos prijunkite 9 V bateriją. Jūsų schema turėtų atrodyti kaip nuotraukoje kairėje, varikliai taip pat turėtų veikti. Jeigu iš tiesų taip yra, sveikiname! Susiraskite prožektorių ir pradėkite linksmintis judindami šviesos spindulį prie robotuko šviesos jutiklių ir stebėdami, kaip keičiasi pelės sparta. Paskui sulieskite jungiklio laidus, sulaukite spragtelėjimo ir stebėkite, ar varikliai keičia kryptį.
Prie schemos prijunkite 9 V bateriją. Jūsų schema turėtų atrodyti kaip nuotraukoje kairėje, varikliai taip pat turėtų veikti. Jeigu iš tiesų taip yra, sveikiname! Susiraskite prožektorių ir pradėkite linksmintis judindami šviesos spindulį prie robotuko šviesos jutiklių ir stebėdami, kaip keičiasi pelės sparta. Paskui sulieskite jungiklio laidus, sulaukite spragtelėjimo ir stebėkite, ar varikliai keičia kryptį.
Jeigu ne viskas veikia taip, kaip turėtų, patikrinkite, ar visi komponentai savo vietose: kondensatorius, rezistoriai, tranzistorius prijungti prie teisingų kontaktų, srovė tiekiama tinkama kryptimi. Naudokite naują bateriją, nepamirškite jos patikrinti matuokliu – gali būti, kad ji per silpna. Jei neveikia pelės akys, patikrinkite, ar gerai prilitavote akių stiebelius, jei būtina – pakeiskite akis kitomis. Kai kurių pelių infraraudonieji spinduoliai veikia geriau nei kitų.
12. Įtvirtinkite schemą pelės korpuse
Paruoštas į šviesą besiveržiančio roboto smegenis reikia įtaisyti pelės korpuse. Kad neapsunkintumėte korpuso, naudokite lengvus laidus ir kuo mažiau lydmetalio.
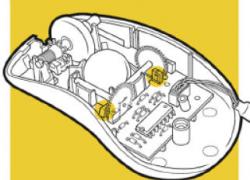
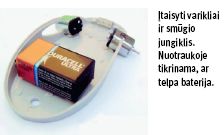
Prieš lituodami patikrinkite, ar visi komponentai telpa pelėje. Įdėkite bateriją, variklius, smūgio jungiklius. Aplink juos išdėliokite kitus komponentus. Rezistorių ir LED jautrumą didinančią grandinę priglauskite prie pelės viršaus. Sudėję elementus patikrinkite, ar korpusas užsidaro, ar lieka vietos laidams.
13. Įtaisykite relę
Paguldykite relę nugarėle žemyn, prilituokite nedidelius laidų gabaliukus prie keturių kojelių X konfigūracija (parodyta paveikslėlyje).
13a. Prilituokite tranzistoriaus kolektorių prie viršutinės kairiosios relės kojelės (16-osios kojelės ant schemos maketo). 10 cm juodą laidą prilituokite prie tranzistoriaus emiterio. Jį prijunkite prie 4-osios lusto kojelės ir neigiamojo maitinimo šaltinio poliaus.
 13b. Trumpu raudonu laidu sujunkite relės 1-ąją ir 8-ąją kojeles. Prilituokite 5 cm juodą laidą prie apatinės 9-osios kojelės, o 8 cm raudoną laidą – prie apatinės 8-osios kojelės.
13b. Trumpu raudonu laidu sujunkite relės 1-ąją ir 8-ąją kojeles. Prilituokite 5 cm juodą laidą prie apatinės 9-osios kojelės, o 8 cm raudoną laidą – prie apatinės 8-osios kojelės.
13c. Priklijuokite relę prie korpuso.
13d. Sujunkite raudonu laidu kairiojo variklio teigiamąjį gnybtą su antrosios nuo viršaus relės kojele dešinėje pusėje (4-oji kojelė). Dešiniojo variklio teigiamąjį gnybtą prilituokite prie relės 13-osios kojelės.
14. Sujunkite jungiklio komponentus
Dabar galite sujungti laikmatį-rezistorių, kondensatorių ir smūgio jungiklį. Pirmiausia komponentus sujungsime ir tik paskui dėsime į korpusą.
14a. Prilituokite 10 cm juodą laidą prie neigiamojo kondensatoriaus poliaus.
14b. Matuokliu nustatykite, kuri jungiklio kojelė smūgio metu susijungia su vidurine. Kitą kojelę nukirpkite.
 14c. Prie likusios kojelės prilituokite rezistorių su laikmačiu.
14c. Prie likusios kojelės prilituokite rezistorių su laikmačiu.
14d. 5 cm raudoną laidą prilituokite prie vidurinės smūgio jungiklio kojelės, priklijuokite jungiklį prie pelės korpuso per anksčiau išpjautą skylutę.
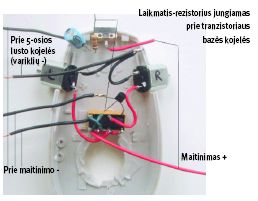
14e. Laidu sujunkite tranzistoriaus vidurinę kojelę ir laikmatį -- rezistoriaus galą.
15. Įjunkite variklius
 15 a. Prilituokite du 5 cm juodus laidus prie variklių neigiamųjų gnybtų, paskui sulituokite neizoliuotus šių laidų galus.
15 a. Prilituokite du 5 cm juodus laidus prie variklių neigiamųjų gnybtų, paskui sulituokite neizoliuotus šių laidų galus.
15 b. Prilituokite trečiąjį 8 cm juodą laidą, kitą jo galą prilituokite prie valdymo lusto 5-osios kojelės.
16. Įdiekite valdantįjį lustą LM386
16a. Palenkite LM386 1-ąją ir 8-ąją kojeles vieną kitos link ir sulituokite jas.
16b. Raskite juodus laidus, nutiestus nuo tranzistoriaus, relės, kondensatoriaus, pašalinkite jų galų izoliaciją ir sulituokite kartu.
 16c. Prilituokite baterijos laikiklio neigiamąjį polių prie 16b žingsnyje suformuoto sujungimo.
16c. Prilituokite baterijos laikiklio neigiamąjį polių prie 16b žingsnyje suformuoto sujungimo.
16d. Prilituokite 3 cm juodą laidą prie 4-osios lusto kojelės, o kitą jo galą – prie neigiamųjų (juodų) laidų junginio.
16e. Prilituokite raudoną relės laidą prie lusto 6-osios kojelės. Paskui priklijuokite lustą prie pelės korpuso.
Apatinė dalis baigta!
17. Įtaisykite akis
17a. Daugumos pelių klavišai – iš dalies pritvirtinti plastiko gabalėliai. Akims patvarų pagrindą paruošite priklijavę pelės klavišus. Kad jie nespragsėtų, palaukite, kol išdžius klijai, paskui išgręžkite nedideles kiaurymes pelės akių vokuose. Pro juos prakišite akių stiebelius.
 17b. Pro kiekvieną kiaurymę prakiškite kiekvieno akies stiebelio 4 cm. Pelės viduje patrumpinkite du raudonus laidus, kad jie susisiektų vienas su kitu, paskui juos sulituokite. Juodus laidus nutieskite į kitą pelės galą ir išlenkite į tą pusę, kurioje yra valdantysis lustas (tačiau dar nelituokite).
17b. Pro kiekvieną kiaurymę prakiškite kiekvieno akies stiebelio 4 cm. Pelės viduje patrumpinkite du raudonus laidus, kad jie susisiektų vienas su kitu, paskui juos sulituokite. Juodus laidus nutieskite į kitą pelės galą ir išlenkite į tą pusę, kurioje yra valdantysis lustas (tačiau dar nelituokite).
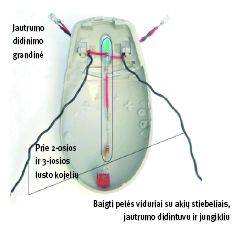
17c. Suformuokite jautrumą didinančią grandinę, 3 cm raudono laido galą prilituodami prie 1 kiloomo rezistoriaus, o kitą – prie LED anodo.
17d. Laisvą rezistoriaus galą prilituokite prie vidurinio jungiklio poliaus, o LED katodą – prie raudonų akių stiebelių laidų sujungimo.
17e. Pasižymėkite, kurioje vietoje yra LED, švelniai jį palenkite ir išgręžkite korpuse skylę LED iškišti (nebent jis jau išlindo pro kiaurymę, kurioje buvo pelės slinkties ratukas). Prakiškite LED ir pritvirtinkite jį lipniąja juosta.
18. Svarbiausia – teisingai sujungti
Mūsų robotas beveik paruoštas! Pritaisykite priekinį ūsą, sujunkite maitinimo šaltinį, jungiklį ir valdantįjį lustą. Šio žingsnio nuotraukų nepateikiame, nes dirbama pusiau uždaroje pelėje. Tačiau jūs dabar pakankamai įgudę ir galite apsieiti be mūsų.
18a. Prilituokite juodus akių stiebelių laidus prie lusto LM386 2-osios ir 3-iosios kojelių.
18b. Prilituokite raudoną baterijos laidą prie jungiklio šoninio poliaus.
18c. Prilituokite raudoną jungiklio centrinio poliaus laidą prie lusto 6-osios kojelės arba 1-osios relės kojelės. Prie vienos šių vietų prilituokite raudoną neprijungtą laidą, nutiestą nuo smūgio jungiklio.
 18d. Norėdami išvengti trumpųjų jungimų, uždenkite visus neizoliuotus laidus ir sujungimus izoliacine juosta. Paskui klijais arba nestipriai lipniąja juosta priklijuokite pelės „ūsą“ prie smūgio jungiklio taip, kad smūgio metu jis spragtelėtų.
18d. Norėdami išvengti trumpųjų jungimų, uždenkite visus neizoliuotus laidus ir sujungimus izoliacine juosta. Paskui klijais arba nestipriai lipniąja juosta priklijuokite pelės „ūsą“ prie smūgio jungiklio taip, kad smūgio metu jis spragtelėtų.
18e. Įtvirtinkite bateriją ir pritvirtinkite vieną pelės korpuso pusę prie kitos. Padėkite robotuką ant žemės, įjunkite ir stebėkite.
Pabaiga
Mėgaukitės robotu–pele
Jeigu viskas pavyko gerai, pelės elgesys bus aiškus vos ją įjungus. Robotas turėtų pradėti važiuoti ir galiausiai atsidurti šviesiausioje kambario vietoje. Rezultatą geriausiai įvertinsite palikę tik vieną šviesos šaltinį. Štai keletas smagių eksperimentų.
Padėkite pelytę ant žemės koridoriuje ir uždarykite visas duris, išskyrus vienerias. Atvertą kambarį apšvieskite kuo ryškiau – po kurio laiko robotukas atkeliaus į jį.
Pakeiskite pelės jautrumą šviesai lankstydami akių stiebelius. Palenkite stiebelius toliau vieną nuo kito, arčiau vieną prie kito, pasukite skirtingomis kryptimis – eksperimentuokite, kol pasieksite norimą rezultatą.
Viliokite pelytę žibintuvėliu. Šis žaidimas labai patiks jūsų naminiam gyvūnėliui! Tačiau būkite atsargūs, mat įsiaudrinę gyvūnai gali užpulti robotą ir bandyti išplėšti vidinius komponentus.
Jeigu pelė neveikia
Jeigu įjungta pelytė nieko nedaro arba elgiasi keistai, tuojau pat ją išjunkite. Gamindami robotuką, kažką padarėte ne taip.
Būtinai naudokite naują bateriją. Patikrinkite, ar ji tvirtai prijungta, ar teigiamasis polius nesupainiotas su neigiamuoju. Patikrinkite, ar neizoliuoti laidai, kojelės nesijungia ten, kur neturėtų. Vienas iš signalų, rodančių, kad grandinėje vyksta trumpasis jungimas, – kaistanti baterija.
Patikrinkite visus litavimo taškus, matuoklių varžas, perlituokite įtartinas vietas.
Jeigu pelė sukasi ratu, greičiausiai blogai sujungėte variklius. Sukeiskite vietomis laidus toje pusėje, kurioje variklis sukasi atgal. Jeigu pelytė sukasi didesniu ratu, tikriausiai variklius sujungėte gerai, bet ne viename lygyje. Sureguliuokite variklių simetriją.
Jeigu pelytė visada juda atbula, sukeiskite vietomis abiejų variklių laidus.
Pagal „Make“ parengė Rūta Makūnaitė