Aprašyme pateiktas nuoseklaus duomenų perdavimo tarp dviejų AVR bandymų plokščių pavyzdys. Bandymų plokštės konstrukciją bei principinę schemą galite rasti mūsų puslapyje.
Pagal šį pavyzdį galima išmokti valdyti įvairius įrenginius, prijungtus prie AVR mikrovaldiklių ir kuriems reikia nuoseklaus duomenų perdavimo.
Duomenys tarp dviejų AVR perduodami dviem laidais, kuriuos sudaro vienas įžeminimo laidas (minuso gnybtas) ir signalo perdavimo laidas. Duomenų perdavimui galima naudoti bet kuriuos mikrovaldiklio prievadų gnybtus. Šiuo atveju siųstuve pasirinkome PORTD 1, o imtuve PORTA 1 išvadus.

1 pav. Siunčiamo signalo laiko išdėstymo pavyzdys
Kadangi duomenys perduodami asinchroniniu būdu (be sinchronizavimo signalo), apsibrėžiama loginio 1 ir 0 trukmė T, kuri yra fiksuota ir žinoma tiek imtuve, tiek siųstuve (1 pav.). Šiame paveiksle pateikta signalo loginių lygių ir trukmės diagrama (laiko diagrama). Ramybės būsenoje, kai įjungtas AVR plokščių maitinimas, PORTD 1 reikšmė lygi 0. Tai ramybės būsena, kai ryšio laidu niekas nesiunčiama. Pradėjus siuntimą, suformuojamas loginis vienetas, kuris reiškia duomenų siuntimo pradžią. Tada imtuvo režime dirbantis AVR mikrovaldiklis pradeda įrašinėti gaunamus duomenis.
Priėmus iš karto žinomą duomenų paketą (mūsų atveju duomenų paketas yra 8 bitų ilgio) ir žinant loginių vienetų bei nulių trukmę, galima atkurti, kokie duomenys buvo siųsti.
Programų pavyzdžiai suformuoti su iš karto įrašytomis siunčiamų duomenų reikšmėmis. Siuntimas vykdomas paspaudus perdavimo mygtukus (nurodyti Portą prie kurio prijungti mygtukai ir kurie iš jų skirti valdymui). Šviesos diodai panaudoti siunčiamų bei priimamų duomenų atvaizdavimui, pagal jų įsijungimą galima spręsti apie duomenų perdavimo teisingumą.
Duomenų siuntimo kodas, parašytas C kalba, pateikiamas su komentarais prie kiekvienos eilutės, kad būtų aiškiau.
Duomenų išsiuntimo algoritmas detaliai pateiktas programos kodo komentaruose.
//*** Asinchroninis duomenų išsiuntimas vienu laidu***
#include <iom16.h>
// prisijungiame pagrindinę „atmega16“
// procesoriaus In/Out biblioteką
#include <intrinsics.h>
//prisijungiame papildomą biblioteką, leidžiančią realizuoti
//užlaikymo funkciją __delay_cycles()
int i;
//apsibrėžiame globalų kintamąjį
void main( )
//prasideda pagrindinė programa
{
DDRD=255;
//nustatome prievadus D kaip išėjimus.
//Iš jų vienas prievadas bus naudojamas
//duomenims išsiųsti
PORTD=0;
//nustatome pastariesiems prievadams
//pradinę reikšmę lygią 0
DDRA=0;
//nustatome prievadus A kaip įėjimus
PORTA=15;
//tam tikriems įėjimo prievadams įjungiame
//„pull up“ rezistorius, kurie ant prievado palaiko nuolatinę teigiamą įtampą
DDRC=255;
//nustatome prievadus C kaip išėjimus.
// Pastarieji bus naudojami siunčiamiems duomenims atvaizduoti
PORTC=0;
//nustatome pastariesiems prievadams pradinę
//reikšmę lygią 0
while(1)
//padarome begalinį ciklą
{
if ((PINA&1)==0)
//tikriname prievado A pirmojo išvado reikšmę.
// Jei reikšmė lygi 0, tuomet vykdoma žemiau pateikta sąlyga.
//Ji bus lygi 0 tuomet, kai bus paspaustas pirmasis jungtukas.
{ int kodas[9]={1,0,1,0,1,0,1,1,1};
//apsibrėžiame lokalų kintamąjį
//kaip vienmatį masyvą, kuriam priskiriame tam tikras reikšmes
for(i=0; i<9; i++){
//vykdome ciklą tol, kol i bus mažiau už 9
PORTD=kodas[i];
//priskiriame prievadui D masyvo
// „kodas“ i-tojo elemento reikšmę.
//Kadangi ji gali būti tik 1 arba 0,
// tai reikšmė bus išvesta į prievado D pirmąjį išvadą.
// Išsiunčiamas duomuo.
__delay_cycles(500000);
//užlaikymas 500 000 ciklų
PORTD=0;}
//prievado D reikšmes nustatome į pradinę padėtį
PORTC=87;
//į prievadą C išvedame siunčiamo kodo reikšmę.
// 87 = 1010111 dvejetainėje skaičiavimo sistemoje.
__delay_cycles(50000000);
//užlaikymas
PORTC=0;}
//nustatome prievadą C į pradinę padėtį
else if ((PINA&2)==0)
// jei ne pirmasis variantas, tuomet
// tikriname antrąjį A prievadą.
//Jis bus lygus 0, kai antrasis jungtukas bus paspaustas. jei taip,
//vykdoma žemiau pateikta sąlyga
{ int kodas[9]={1,0,0,0,0,0,1,0,1};
//skiriasi masyvo „kodas“ reikšmės
for(i=0; i<9; i++){
//procesas kartojasi kaip yra aprašyta aukščiau
PORTD=kodas[i];
__delay_cycles(500000); PORTD=0;}
PORTC=5; __delay_cycles(50000000); PORTC=0;}
// 5 = 101 dvejetainėje skaičiavimo sistemoje
else if((PINA&4)==0)
// procesą kartojame.
//Tikriname trečiąjį A prievadą. 4 = 100 dvejetainėje sistemoje.
{ int kodas[9]={1,0,1,0,0,1,0,1,1};
for(i=0; i<9; i++){
PORTD=kodas[i];
__delay_cycles(500000); PORTD=0;}
PORTC=75; __delay_cycles(50000000); PORTC=0;}
else if((PINA&8)==0)
// procesą kartojame.
//Tikriname ketvirtąjį A prievadą. 8 = 1000 dvejetainėje sistemoje.
{ int kodas[9]={1,1,1,0,0,0,0,0,1};
for(i=0; i<9; i++){
PORTD=kodas[i];
__delay_cycles(500000); PORTD=0;}
PORTC=193; __delay_cycles(50000000); PORTC=0;}
} //amžino ciklo pabaiga
} //pagrindinės funkcijos pabaiga
Kadangi duomenys siunčiami po vieną bitą, todėl imtuve būtina atlikti duomenų surinkimą ir suformavimą į 8 bitų paketą, nes tokie duomenys buvo išsiųsti.
Priėmimo metu prievado A pirmasis išvadas laukia startinio bito (1 pav.), kuris lygus 1 ir turi iš karto imtuve žinomą trukmę T. Jam pasirodžius, pradedamas masyvo pildymas, prilyginant prievado A išvadą masyvo elementui i. Panaudojus ciklą su 8 kartų pasikartojimu (kadangi 8 bitų duomenų paketas), visi priimami bitai surašomi į masyvą.
Kai masyvas užpildytas, jo elementai paverčiami į dešimtainį skaičių bei prilyginami prievadui B, kad jame matytume priimtus duomenis.
Imtuvo programa palyginus su siuntimo yra paprastesnė, kadangi nereikia formuoti siunčiamo signalo:
#include <iom16.h>
#include <string.h>
#include <intrinsics.h>
int i=0;
void main( )
{
unsigned char a;
unsigned char data[10];
DDRB=255;
//Nustatome prievado B visus išvadus kaip išėjimus.
while(1)
{
if ((PINA&1)==1)
//Tikriname, ar prievado A reikšmė lygi vienetui, jei taip,
//pradedame pildyti masyvą „data“.
{
for(i=0; i<10; i++){
//Ciklą kartojame 8 kartus, nes priimame 8 bitų kodą, ir pildome masyvą „data“.
data[i]=(PINA&1);
//Kai prievado A pirmojo išvado reikšmė lygi vienetui,
//į masyvo elementą įrašome 1, o kai reikšmė lygi nuliui,
// į masyvo sekantį elementą įrašome 0.
__delay_cycles(500000); }
a=(data[2])+(2*data[3])+(4*data[4])+(8*data[5])+(16*data[6])+
+(32*data[7])+(64*data[8])+(128*data[9]);
//Dvejetainius skaičius paverčiame dešimtainiu.
PORTB=a;
//Iš prievado A pirmojo išvado gautus duomenis, atvaizduojame prievade B.
__delay_cycles(50000000); PORTB=0;
}
else PORTB=0;
}
}
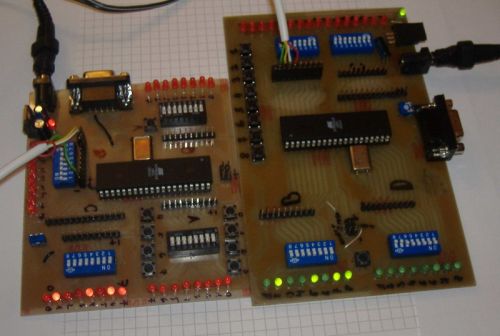
2 pav. Duomenų siuntimo pavyzdys siunčiant „01001011“ duomenų paketą
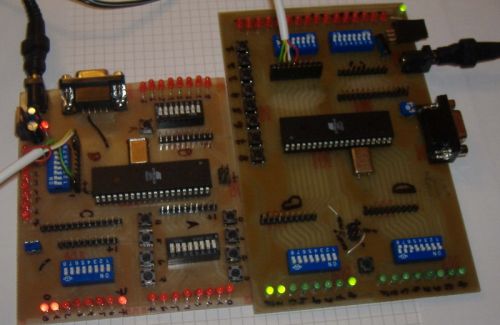
3 pav. Duomenų siuntimo pavyzdys siunčiant „11000001“ duomenų paketą
Taigi, kaip matyti (2 pav., 3 pav.) pavyzdžiuose, duomenų siuntimas atliekamas sėkmingai, kadangi siųstuve bei imtuve sutampa duomenų paketai. Atlikti bandymai parodė, jog tokiu būdu yra perduodami duomenys palyginti lėtai.
Naudojant tokį programos kodą didesnio greičio gauti nepavyko. Eksperimentai buvo atliekami su įvairaus ilgio kabeliais. Kabelio ilgis klaidų atsiradimui neturėjo įtakos. Didinant duomenų perdavimo spartą išsiųsti ir gauti duomenų paketai nesutapdavo dėl suderinamumo stokos. Bet vis tik šis pavyzdys gerai iliustruoja signalo perdavimą dvilaide linija, kurį patobulinus, galima gauti gerą ir greitą duomenų perdavimą.
Pasinaudojus pateiktais pavyzdžiais, galima išmokti formuoti nuoseklius signalus, ne tik vienam išvadai, bet ir keliems. Toks signalų formavimas gali pasitarnauti bandant pasirašyti nuosavą programą temperatūros daviklių valdymui, arba realizuoti plačiai naudojamą I2C protokolą. Tolimesni žingsniai, supratus ir išmokus realizuoti pavyzdžius, panašius į pateiktą, suteikia galimybę bet kokio tipo įrenginio valdymui.
Failai: